In recent years, the field of soft robotics has witnessed a surge in innovation, particularly with the development of Fabric-Based Soft Pneumatic Actuators (FSPAs). These devices, which are both flexible and soft, play a crucial role in robotics due to their ability to deform under pressure, allowing them to perform various tasks safely and efficiently. FSPAs can inflate or deflate, enabling movement through bending, twisting, or stretching — an essential characteristic that makes them ideal for applications in wearable technology, robotic grippers, and assistive devices. However, despite their potential, the design and fabrication of FSPAs have posed significant challenges to researchers and engineers.
The Role of Turing Patterns in Actuator Design
A recent groundbreaking study published in Scientific Reports highlights how the concept of Turing patterns, derived from Alan Turing’s theory of morphogenesis, can facilitate the design of these actuators. Turing patterns emerge from reaction-diffusion processes and manifest as stable, repeating motifs in nature, such as stripes or spirals. The research team, led by Dr. Masato Tanaka, Dr. Tsuyoshi Nomura, and Dr. Yuyang Song, recognized the potential of these patterns to simplify the design of FSPAs by enabling controlled movements with a simple mechanism, eliminating the need for specialized materials or intricate technologies.
Dr. Takana emphasized the team’s motivation, stating that a pressing requirement exists within the soft robotics community for actuators that are simple yet effective. By incorporating Turing’s principles into their design methodology, the researchers sought to develop FSPAs that not only exhibit functional diversity but also do so at a low cost.
A significant hurdle in the traditional design of pneumatic actuators revolves around the reliance on isotropic materials, which exhibit uniform properties across all directions. While effective for consistent deformation, these materials often necessitate trial and error during the design phase — a time-consuming impediment for researchers. The damaging cycle of tweaking physical prototypes can slow down progress and hinder innovation.
The research team aimed to circumvent these challenges by leveraging Turing patterns to optimize the materials used in FSPAs. By focusing on anisotropic materials, which possess directionally dependent properties, they intended to unlock new potentials in actuator design. This strategy promised enhanced control over how these components morph in response to pneumatic input, thus broadening their application scope.
The innovative approach taken by the researchers involved a gradient-based orientation optimization method, which was crucial to the successful implementation of Turing patterns. By employing nonlinear finite element methods, the team was able to rearrange the fibers within the fabric in precise patterns, allowing for desired deformation profiles during inflation.
This intricate design process began with modeling the anisotropic reaction-diffusion systems mathematically, which contributed to generating Turing pattern-based textures on the actuators. By enhancing the anisotropic nature of the materials, they ensured that each actuator would deform predictively, thus streamlining the production process and mitigating the uncertainties typically associated with trial and error.
Fabrication Techniques: A Blend of Tradition and Innovation
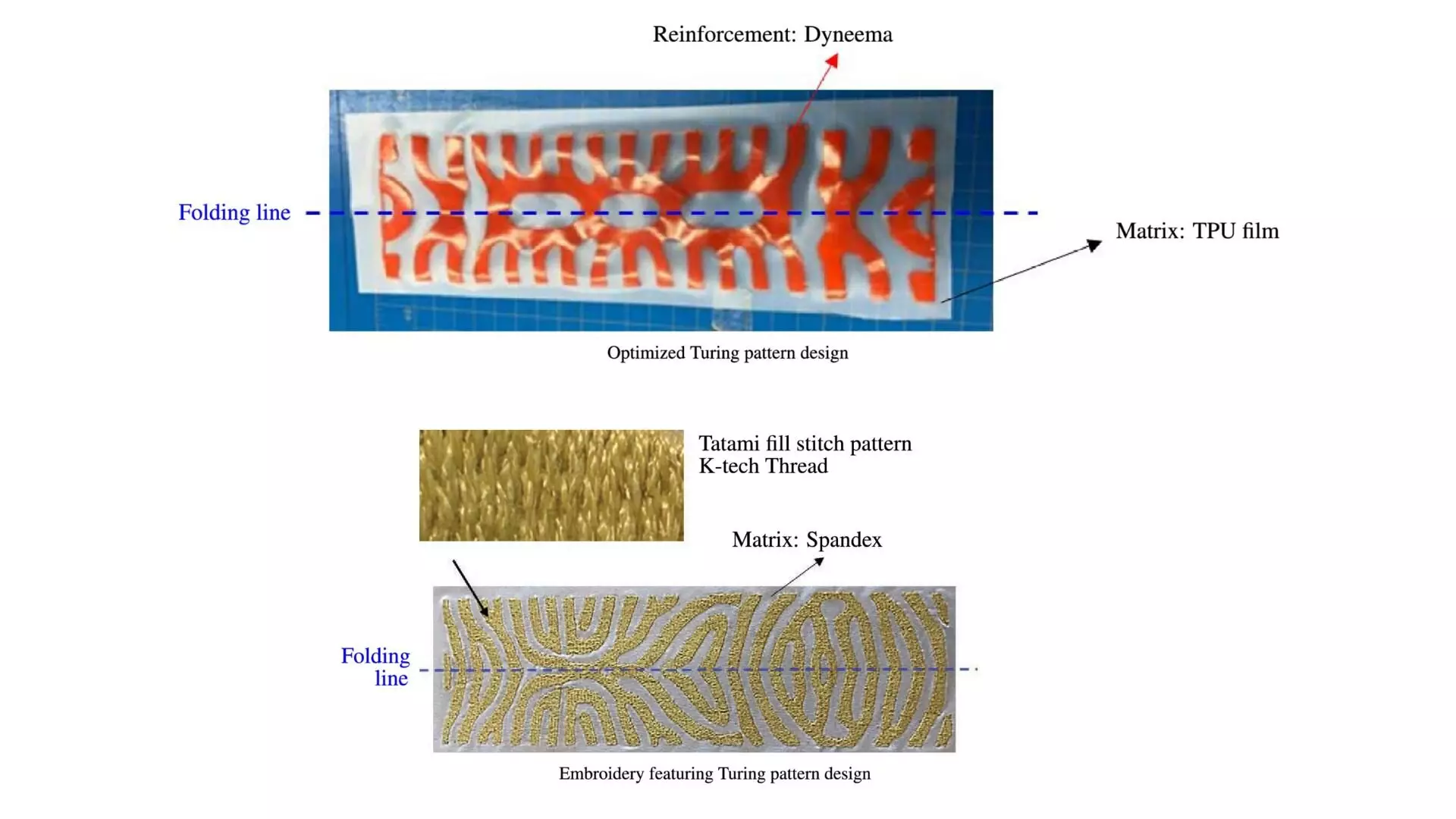
The fabrication phase was equally critical to the overall success of the project. The researchers examined two primary methods: heat bonding and embroidery. Heat bonding involved using laser-cut rigid fabrics to create Turing patterns, which would be combined with softer fabrics using heat presses. On the other hand, the embroidery technique allowed for the integration of Turing patterns directly into the soft fabric, utilizing stiff threads to form regions of varying stiffness. This variation in stiffness facilitated controlled movement, thereby enhancing performance.
The results from these fabrication methods have indicated promising pathways toward scalable production. Unlike traditional methods that can be costly and labor-intensive, these new techniques provide economical solutions that can easily adjust to modern manufacturing needs.
The experimental outcomes revealed that the newly designed FSPAs featuring Turing patterns outperformed classical designs under specific constraints. For instance, C-shaped actuator configurations demonstrated a notable performance advantage, while S-shaped bending, often problematic in traditional designs, could now be effectively achieved through textural design optimization.
Looking ahead, the researchers are eager to explore the integration of these Turing-patterned actuators with advanced materials such as electroactive polymers and shape memory alloys. They aim to enhance the dynamics and responsiveness of FSPAs, which would inevitably open new frontiers in soft robotics.
The innovative exploration of Turing patterns in FSPA design exemplifies a significant shift towards optimizing soft robotic technologies. By addressing long-standing challenges through automation and material optimization, the research team has laid the groundwork for more adaptable, efficient robotic systems that can one day reshape how we interact with our environments.